Rotational Dynamics of Rolling Motion - Video Tutorials & Practice Problems
On a tight schedule?
Get a 10 bullets summary of the topic
1
concept
Rotational Dynamics of Rolling Motion
Video duration:
13m
Play a video:
Hey, guys. So in this video, we're gonna talk about the rotational dynamics off rolling motion. Rotational dynamics just means you have a problem of torque and acceleration. Enrolling motion just means you have a knob checked that rolls around itself while moving sideways, right, while the axis of rotation moves while the object rotates kind of like a toilet paper that instead of being fixed on the wall, you just roll it on the floor, right? So it does this. That's what role emotion is. So let's check it out. All right, So in some problems, it says a disc like object accelerates around the free access again. Free access is the toilet paper that instead of being fixed on the wall, it's free to move, so it rolls while moving. Um, it says here and these the objects will have obviously both rotational and linear motion. Eso, for example. In this case, this guy is falling down here. Um, it's going to have if you release it from grass, it's gonna have a knack celebration this way. Um, and it's going to have an Alfa this way. Okay, so we're going to use both some of all forces equals m A. Because he has a name. And some of all torques equals I Alfa because he has an Alfa and we're gonna do this for the same objects. Okay, that same object has two motions, so we can write two equations and remember the direction of positive in both will follow the direction of a A and Alfa. Okay, so this is going to be positive, and this is going to be positive. Remember, also that enrolling motion rolling motion is the situation we're talking about. There's an extra equation, which is that the velocity at the center of mass, which is this lips V. C. M is tied to your omega by this equation, V c m equals R omega. Okay, a lot of times you see this equation an equation similar to this that's V equals little are omega. This one is V equals big are omega because it always has to do with the radius of this objects. Okay, so this is an extra equation that's possible. Um, that's possible because you have rolling motion. Another equation that's also possible is just like a V equals big are omega. You have a equals big art Alfa. Okay. And in these cases, it's always going in This problem in rolling motion, it's always going to be big are all right now. One remind of some quick things when you have a disk like objects that is rolling freely. Um, the torque. The torque will come from static friction. Okay, let's talk about that real quick. Which torque are we talking about? Well, this guy has an Alfa. And remember, to have an Alfa, you have to have a torque. Acceleration comes from a net force in an Alfa comes from a net torque. Okay, a torque is what's causing an Alfa. And in this case, the force that's causing this torque. The torque comes from a force, and in this case, the force is static friction. Okay, so in static friction, if the torque is this way, I'm sorry if Alfa is this way, then torque has to be this way. Which means that friction has to act in a direction that causes this. Which would be like this. I hope you can see friction static right there. I hope you can see that if you have a disk and you push, here's the surface right and you're pushing the disk like this, right? I'm doing basically like this. Imagine I'm doing this to the disk. It's gonna cause it. This is to do this right. That's exactly what frictions doing. So friction goes this way and causes a torque of friction. So the force of friction produces a torque of friction, which causes an acceleration. So the disk not only falls this way, but it also does this as it's falling. Okay, so two things to remember if there is, if there is an acceleration. In other words, if your Alfa is not zero, there has to be static friction. And I like to remember this by using the following short phrase you need static friction to Alfa. If you don't have static friction, you don't have an Alfa. What that means is that if you're not spinning, you're not gonna start. If you're if you're initially not spinning, you have no way of beginning to spin. And if you are already spinning, you have no way of stopping. You're spinning. You will keep spinning because there's not going to be any change. Another key word is if without slipping, this means that there is no kinetic friction. And guess what? This is always going to be the case. Always. Okay, this is standard language, not slipping. So you're not gonna have kinetic friction in these problems. And if you have acceleration, if you have acceleration, fix celebration is not zero. Okay, If you're acceleration is not zero, then there has to be static friction because you need static friction to have acceleration. Cool. Let's do a problem. So it says here when a solid cylinder of Mass M and Radius R is released from rest, it rolls down without slipping along an inclined planes. Let's draw that. I got an inclined plane like this just like the picture of above, and I released this from rest. So the initial velocity is zero. This guy has mass m and radios are, and it rolls down, okay, Rolls down means it's gonna do It's gonna have an acceleration. This way without slipping without slipping is standard language. But it does tell you that there is no kinetic friction for sure along an inclined plane that makes an angle of Fada, and we want to derive an expression for the angular acceleration that this we want to know what is Alfa Okay? How do we do this? Well, this is an acceleration problem. So we would use Africa's in may Accept that there's also rotation. So we're going to use efficacy bay and torque equals Alfa. Um in Both of them are for the same object because the object has two motions. One object with two motions means two equations, some of all forces equals in May and some of all torques equals I Alfa. Okay, Now let's look at the forces on this on this thing here. So I'm gonna draw it over here. I have an mg pulling you down. I have to decompose the m g into M g X and M g y This way. I have a normal like this and I have a friction that acts over here. Friction, static, those air, all the forces in terms of torques, the only torque comes from this. Okay, normal on a on a disk that spins on the surface, never produces any torque on m G in the center of mass. Never produces any torque, if you remember. Right, So the only one here is torque of static friction. Cool. Remember also that once you split m g into M g x and M G y mgs essentially dead. You got rid of it and replaced with two other things. So it's really no longer there. Remember also that M. G y cancels out with normal. So really, the only thing is you have is these are the two forces in the X axis, which is down the plane. Um, and this is the Onley torque. Okay, so the forces are, um M g X and friction. Now which one is positive in which one is negative? Well, this is the direction of positive. So M g X is the positive one, and friction is negative. That equals m a torque. There's only one torque, which is the torque of static friction, the moment of inertia. I is going to be the moment of inertia of a solid cylinder because it says right there half m r squared in Alfa, Remember, we want to replace Alfa with a If you have a and Alfa, you want to get rid of Alfa and change it into a and that's so that instead of having a and Alfa you have excuse me, you have a and a to do this. We use the fact that a equals R Alfa big are because this is rolling motion rolling move so I can rewrite Alfa as a over big are And that's what I'm gonna do. I'm gonna put a over big are over here and and that's so that's this Alfa becomes an A. So I have a and a cool last step is I have to. There's there's, um, not much else to do here. I'll get back to this in a second. I'm gonna expand this one more time, and this is going to be torque of any force. F is f r sine of theta the force we're talking about here. Static friction are is the our vector. In this case, it's always going to be the radius as well, because noticed that friction always acts at a distance of the entire ratings. If you draw on our vector, here are Vector, of course, is from the axis of rotation to the point where the force happens for friction. It's always going to be big art, so the torque of friction is always friction. Big are, and the angle is always 90 degrees So this is always the case for I'm gonna put here always. The torque due to friction is always f big. Are Okay, so now that I did that on the side, I'm just gonna plug it in here and then look what happens. All the R's will cancel, which is me are cancers with this. This cancels with this and you're left with friction. Static equals half m a. Now, I wanna warn you not to get too excited with the expanding of these equations and rewrites friction into mu normal. You could do this. You may remember friction is mu normal. You should remember friction is normal, but you don't wanna You don't want to rewrite, you don't wanna expand. And that's because Guess what? There's a friction here, and there's a friction here. All friction is doing, um, similar to what you would see with attention if you had a cable pulling on the block. All it's doing is connecting these two equations, right? So don't expend friction. Just plug it in right there. So let's do that. Um, m g. If you remember, MGI is mg sign of data. That's m G X becomes mg sign of theta minus half m A equals m a notice here that I wrote little M little M and Big M. And that's because I usually write f equals in May with a little M. But I usually write I with the big M because a lot of the equations are like that. It's really the same thing because it's referring to the same object so I can cancel. If you have a single object, the MASS will cancel. Okay? And we're solving for a So I'm gonna move this over here. I have G sign of theta equals a plus half A. Okay, a plus half a is one plus half one half 1.5 or three over to a So a is. The two goes up here to G sign of data, and the three goes down there. But okay, this is the final answer for a We still gotta get Alfa. But I wanna again make a point here. Um, notice how this equation looks familiar. It should look familiar if you have a block that is accelerating down and there's no friction, right? There's no kinetic friction. Um, it's accelerating down because of M G X three. Acceleration of this block is G sign of data. You may remember this from, like, back in the day, right? G sign of data. Well, notice this equation is very similar. Accepted instead, off instead of having like a one here hiding right, you have some fraction in front of it. And this fraction is always going to be less than one. The point here is that in rotation questions that are the rotation equivalents of linear questions, right, like, this is just the rotational equivalent of this. That's Olivero. This is just a rotation equipment of this. So the equation for a here should look similar to this equation. And that's how you know you are on the right track, provided, of course, that you vaguely remember this and you can say, Hey, that looks familiar. Okay, so I like to make that point a lot, because this way you can know that your general generally in the right direction and gives a little bit more certainty. The correct And another thing that allows you to do is that if this number here is more than one, for whatever reason, which it would be if you screw up your signs. Um, then you know that you're wrong and you have to go back. There should always be less than one. All right, so let's wrap it up and find Alfa. Alfa is a over our. So it's just gonna be two g sign of data divided by three are. Okay, this is our final answer, and we're done. That's it for this one. I hope this makes sense. Make sure know how to do this stuff. Let me know if you have any questions and let's keep going.
2
Problem
Problem
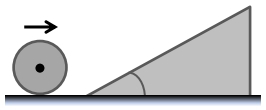
A hollow sphere 10 kg in mass and 2 m in radius rolls without slipping along a horizontal surface with 20 m/s. It then reaches an inclined plane that makes 37° with the horizontal, as shown. If it rolls up the incline without slipping, how long will it take to reach its maximum height? (Hint:You will need to first calculate its acceleration)
A
3.58 s
B
4.26 s
C
4.75 s
D
5.67 s
Do you want more practice?
We have more practice problems on Rotational Dynamics of Rolling Motion
Additional resources for Rotational Dynamics of Rolling Motion